
【導讀】未來駕駛輔助系統將依賴于準確、可靠和連續的其他道路交通參與者的位置信息,這些交通參與者包括:行人、自行車和其他車輛。通常解決這一問題的方案是采用車載的測距傳感器。本文給讀者提供一個關于不同車輛相對定位技術的綜合性概述。
1 摘要
未來駕駛輔助系統將依賴于準確、可靠和連續的其他道路交通參與者的位置信息,這些交通參與者包括:行人、自行車和其他車輛。通常解決這一問題的方案是采用車載的測距傳感器。雷達、激光雷達和基于視覺的系統能夠檢測到視線內的物體。與這些非協作式傳感器相反的是,協作式傳感器遵循的策略是所有的道路參與者主動地提供估計的相對位置信息。可以使用基于車車通訊的協作式方法彌補車載測距傳感器檢測范圍、視角和設施堵塞的缺陷。協作式策略和非協作式策略的融合從定位的準確性和魯棒性角度來考慮似乎都能夠得到最大的益處。本文給讀者提供一個關于不同車輛相對定位技術的綜合性概述。
2 引言
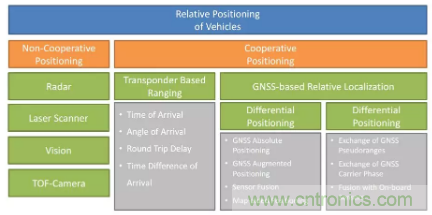
用于車輛相對定位的測距傳感器和技術可以概括為下圖,首先分為兩大類:非協作式定位和協作式定位。非協作式定位包括:雷達、激光掃描儀、視覺和TOF攝像機;協作式定位包括:基于轉發器的測距(根據射頻信號直接估算相對距離)和基于GNSS的相對定位(通過通訊的方式傳遞GNSS測得的位置相關信息,包括GNSS解算得到的位置和原始的GNSS信息,如偽距)。具體對各個定位技術的介紹請參見原文,限于篇幅,本譯文只進行部分翻譯,著重于定位需求的分析以及對各個定位技術的評價。
3 需求分析
3.1 精度(Accuracy)
一般來講,測量系統的精度可以定義為測量值和真實值的接近程度。在定位系統中采用測量值和真值的差值來定量描述該接近程度。通常定位系統中的精度指的是三維的定位精度,然而在車輛應用當中由于車輛是在道路上行駛的,一般不太關注垂直的車輛位置,因此一般采用二維的位置精度。定位的精度一般定量的描述為均方根誤差(RMSE,Root Mean Squared Error)或者其它慣例比如95%置信區間。當評價車輛相對定位系統的精度時,通常將沿軌跡方向和垂直軌跡方向的精度區分對待。尤其是對于車載測距傳感器,需要區別對待測距精度和測量角度的精度。
同測得的相對位置和相對速度信息一樣,當前測量結果的不確定性信息對于駕駛輔助應用也是有用的。根據目標車輛檢測距離、視角、目標物體的材質以及環境條件的不同,傳感器的精度也會有所不同。理想的相對定位系統應該能夠提供沿軌跡和垂直軌跡方向的高精度、無偏差的相對位置和速度信息,還包括當前估計的不確定性。Shladover and Tan 指出1m的定位精度在碰撞預警可接受的邊緣,而50cm的精度會顯著的提升系統的性能。
3.2 可靠性(Reliability)
特別是對于安全關鍵應用(safety-critical applications),系統的可靠性是非常重要的因素。一個系統可能精度很高,但是如果不夠可靠也不行。在系統工程中,可靠性也稱為完整性。完整性給出了“可以對整個系統提供信息的正確性進行的信任度量”。完整性還包括在超過特定參數的誤差極限時提供警報的能力。完整性分析產生特定參數的置信區間,即所謂的保護級別,以及完整性風險,即測量不包含在保護級別內的概率。雖然在民用航空中對所有相關的操作部件施加了嚴格的完整性要求,但在公路運輸領域才剛剛開始特別考慮完整性。道路車輛功能安全標準(ISO 26262)定義了所謂的汽車安全完整性等級,以量化車輛內部的每個功能,軟件和硬件組件相關的風險以及與安全關鍵應用相關的風險。
3.3 可用性(Availability)
定位系統盡可能地可用是非常重要的,多種原因會導致可用性降低。基于GNSS的定位系統可能在衛星視線完全阻塞的情況下不可用,例如在隧道中。不僅是GNSS,任何類型的基于無線電的定位系統都可以通過干擾信號而變得不可用。基于視覺的測距系統可能不適用于霧、大雨或夜間等條件。
只有當各車輛配備有所需的定位和通信設備時協作式方法才可用。在早期開發階段,較低的滲透率將產生事實上的低可用性。因此為了給安全系統提供連續的操作,對可用性的要求應達到接近100%。
3.4 檢測范圍和視場(Detecting Range and Field of View)
激光掃描儀和視覺等測距系統具有視線特性,這意味著它們只能測量可以直接看到的相鄰障礙物的位置,并且很容易被其他車輛,建筑物或周圍的地形所阻擋。這些系統還受到它們有限的發射功率或傳感器靈敏度的限制。此外其視野也有限,由它們掃描環境的方位角和仰角的張角所定義,為了克服這種限制,需要在車輛周圍放置多個傳感器以獲得360度的環境視圖。而利用V2V通信和全向天線,可以實現對環境的全方位感知。
3.5 維度(Dimension)
空間中的位置是三維分量,因此它是一種相對的位置坐標。許多相對定位系統單獨使用僅能夠測量一維或二維的相對位置。基于GNSS的協作式解決方案能夠在車輛之間提供完整的3D相對位置。
3.6 目標分辨和識別(Target Resolution and Identification)
目標的分辨指的是分辨不同對象的能力。量化目標的數量并隨著時間的推移對目標進行跟蹤對于駕駛輔助系統來說非常重要。臨近的目標可能會被車載測距傳感器錯誤地合并為一個單獨的對象。系統檢測和跟蹤目標的最大數量會受到測距傳感器內部處理能力以及車載處理能力的限制。根據道路環境的不同,為獲得與安全相關的應用所需的對物體的辨識,將需要跟蹤多達100個目標。另外,隨著時間的推移對目標的明確識別是對于相對定位解決方案的進一步要求,即在檢測和跟蹤中斷時為同一目標提供相同的ID。
3.7 系統延遲(System Delay)
安全相關的駕駛輔助應用,通常具有需要快速響應和高動態的特性。警報系統及時發出警報并且控制系統能夠平穩地響應相對位置的變化是十分重要的。為此,來自相對位置設備的信息必須在短時間內處理并以足夠高的速率輸出。在隊列行駛中,追求快速可靠地控制車輛的速度和轉向。雖然今天的ACC應用需要10 Hz到20 Hz的更新速率,但未來的碰撞檢測和預碰撞應用需要高達50 Hz的更新速率。
測量的輸出頻率是一個重要因素。測量的延遲(即從物理事件發生直到輸出到應用程序所經過的時間)也是很重要的,因為它導致前向碰撞預警(FCA)障礙物檢測的延遲或者在隊列應用中控制的不穩定。例如,雷達傳感器和激光掃描儀對速度變化不敏感,它們只能通過對連續測量量的觀測來估計加速度,并因此受到延遲增加的影響。直接傳輸車輛傳感器信息的協作式解決方案將克服該限制。然而,V2V通信將引入傳播和通信系統的延遲。
3.8 非技術方面的要求(Non-Technical Requirements)
在評估某個相對定位系統的適用性時,還應考慮其他非技術要求或限制。比如在商用客貨運車輛中,價格起著重要作用。某種相對定位解決方案的成本不僅是在汽車中裝載該設備的直接價格,還需要考慮二次成本,包括安裝和維護成本,處理能力,重量和功耗,以及所產生的噪音和熱量。在使用基于基礎設施通信(例如蜂窩通信)的協作式解決方案中,可以預期運行成本會以月費或年費的形式以維持基礎設施和使用許可頻帶。
4 結論
本文對不同協作式和非協作式的測量相對位置的傳感器和用于當前駕駛輔助系統以及未來自動駕駛系統的技術做了總結,并列于下表中。上文所述的需求分析也在增加在了表中來定量的衡量以上的各種技術,通過采用5個符號(++,+,o,-,--)來表明傳感器在某一方面的性能的優劣(++最好,--最弱,o表示性能中等)。
在線的測距傳感器比如雷達傳感器和激光掃描儀能夠提供較高的距離精度,但雷達傳感器側向的分辨率較低,激光掃描儀能夠提供較高精度的側向距離。兩者均能夠為安全相關應用提供可接受的更新頻率(>10Hz),但是只有雷達能夠直接提供相對速度信息。基于視覺的系統只能估計近距離車輛的距離,并且必須使用有關物體和背景的附加信息來估計距離更遠車輛的距離信息。只能通過比較連續圖像的信息來獲得相對速度。激光掃描儀和攝像頭系統由于依賴可見光導致可用性較低,并因此對不理想的照明和氣候條件敏感。最終由激光掃描儀或攝像機支持的雷達傳感器是用于安全關鍵的高級駕駛輔助系統相對定位非常適合的方法。
基于雷達和視覺的解決方案在縱向和橫向性能方面能夠相互補充。雷達傳感器的帶寬增加將使得回波信號中能包含更多的細節信息。雷達傳感器的研究方向為更強大、更精確的檢測和跟蹤算法。此外,用于基于視覺的車輛跟蹤系統的圖像處理算法將繼續發展以降低錯誤檢測率和道路物體的錯誤分類。
關于成本,雷達傳感器在過去十年中價格下跌,預計基于視覺的系統也會發生同樣的情況,因為相機技術已經在消費市場中占據了一席之地,并且該技術已經成熟,可以引入汽車領域。而激光掃描儀由于其機械部件的存在,可能需要更多的時間才能夠具有足夠的吸引力以便找到市場。
所有非協作式方法都具有視線特征,并且容易被障礙物阻擋,例如其他車輛或者在彎曲的鄉村道路以及城市環境中具有有限的范圍。此外,使用RSS(Received Signal Strength,信號接收強度),RTD(Round-Trip Delay,往返延遲)和TOA(Time-Of-Arrival,到達時間)測量的基于協作轉發器的方法在非視距條件下表現出太大的誤差。這被認為是其應用于車輛安全應用的重要缺點,因為其需要及時地對車輛前方的動態事件作出反應。而基于V2V通信的協作式方法可以應對達到幾百米的視線遮擋,通過車輛之間的定位信息交換來實現相對定位。在這里,不同的解決方案相互競爭,以滿足高級駕駛輔助應用的要求。獨立GNSS解決方案不滿足相對位置和相對速度的準確性和可用性要求。GNSS與車載運動傳感器和慣性傳感器的融合用于絕對位置確定,提高了可用性和準確性。使用GNSS載波相位解決方案可以實現厘米精確的相對位置,但是具有對衛星視線阻塞的高靈敏度的缺點,導致有限的可用性并且僅保留用于開放天空場景。
盡管如此,基于GNSS的解決方案在城市峽谷或隧道等具有挑戰性的環境中的有限可用性和低精度仍然是未來基于V2V通信的合作方法需要解決的主要問題。高精度地圖將成為未來自動駕駛汽車獲得準確絕對位置坐標定位的關鍵。通過使用車載感知傳感器,自動駕駛車輛將能夠識別周圍的特征,并且可以得到自己的位置信息或與其他車輛共享這些信息,以便獲得自己與其他車輛的相對位置關系。
協作式和非協作式的融合是最有希望的相對位置估計方法。建議將具有高精度和對于照明與氣候條件具有良好魯棒性的雷達傳感器與具有擴展全方位范圍和識別能力的V2V通信相結合。基于視覺的系統和雷達傳感器將來可以將最低級別的協作式技術提供的周圍道路使用者的信息納入其中用以改善車輛檢測和不同目標的分辨率。對于協作式方法,若將GNSS的偽距和載波相位測量值進行交換,并與運動傳感器和慣性傳感器信息結合將能夠提供最高的準確性、可用性和魯棒性。

