
【導(dǎo)讀】永磁同步電機 (PMSM) 由于其高效率、高功率密度和出色的機械動力性能而廣泛應(yīng)用于工業(yè)領(lǐng)域。PMSM通常采用磁場定向控制 (FOC,也稱矢量控制)來驅(qū)動,以提升其動態(tài)響應(yīng)并能 充分利用電機潛力。PMSM 矢量控制包含電流環(huán),速度環(huán)和位置環(huán)。為了實現(xiàn)最佳性能的控制設(shè)計,工程師需要精準的電機參數(shù)為 PMSM 控制系統(tǒng)建立適當?shù)臋C械和電氣數(shù)學(xué)模型。
數(shù)據(jù)手冊并不總是可以獲得,即使有,通常也不會涵蓋每臺電機面對的工作條件。本文將介紹一種識別 PMSM 參數(shù)的簡單方法,它利用 MPS的智能電機控制模塊解決了這個難題。這種智能電機基于帶遺忘因子的遞歸最小二乘 (RLS) 算法,可以實時修改和監(jiān)測 PMSM參數(shù)的變化。
PMSM的磁場定向控制(FOC)
FOC 的基本思想是能夠分別控制磁通量和扭矩,類似于控制直流電機的方式。根據(jù) Clarke 和 Park 變換,同步旋轉(zhuǎn) Q-D 坐標系下的 PMSM 模型可以使用等式(1)、等式(2)、等式(3)和等式(4)來計算: $$v_{QS}=r_S+ω_Rλ_{DS}+ρλ_{QS}$$
$$v_{DS}=r_{S}-ω_rλ_{QS}+ρλ_{DS}$$
$$λ_{QS}=L_Si_{QS}+L_Mi_{QR}$$
$$λ_{DS}=L_Si_{DS}+L_M i_{DR}$$ 其中下標 Q 和 D 分別表示 Q 軸和 D 軸變量, LS為電機自感,LM為電機互感。
為了進一步簡化控制,轉(zhuǎn)子磁通應(yīng)在 D 軸上對齊,而 Q 軸上的轉(zhuǎn)子磁通為零。Q 軸和 D 軸的磁通量可以分別用等式 (5) 和等式 (6)來估算:
$$λ_{QS}=L_Si_{QS}$$
$$λ_{DS}=L_Si_{DS}+λ_M^{''''''''}$$ 電磁扭矩可以用公式(7)來計算: $$T_E= frac {3} {2} frac {P}{2} (λ''''''''_{M}i_{QS} + (L_{D} - L_{Q}) i_{DS}i_{QS}) $$
遵循上述方程的轉(zhuǎn)換步驟,磁通量可以直接由 D 軸電流控制。采用恒定的IDS,可以通過調(diào)節(jié) Q 軸電流直接控制扭矩 (TE)。 如果IDS= 0,則電磁扭矩與IQS成正比。 通過上述推導(dǎo),我們可以得出PMSM的FOC原理圖(見圖 1)。
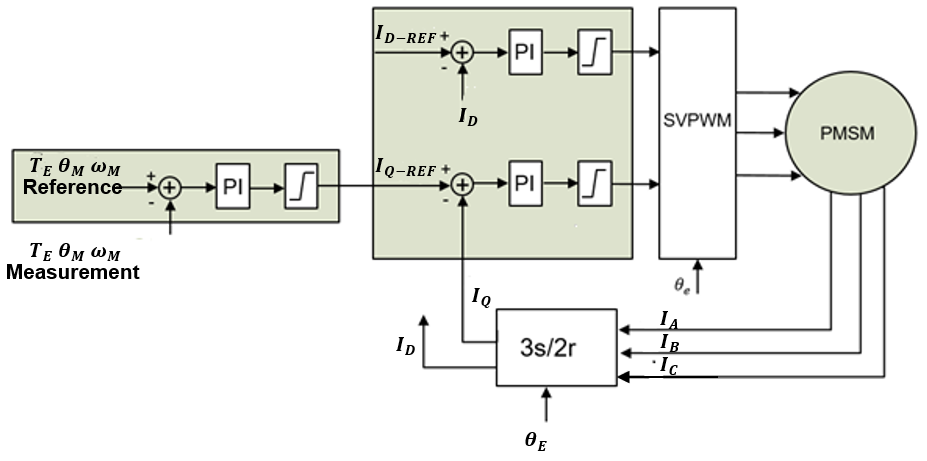
圖 1:PMSM 矢量控制原理圖
外環(huán)參考值可以是所需的扭矩、電機速度或特定的軸位置。將外環(huán)參考值與測量值進行比較,并將誤差饋入控制器(通常為 PI 控制器)以生成扭矩電流參考值 (IQ-REF)。
D 軸電流參考值 (ID-REF) 根據(jù)磁通量要求來設(shè)置。電流調(diào)節(jié)器/控制器的輸出(VQ-REF和VD-REF)為空間矢量 PWM (SVPWM) 的輸入。SVPWM 模塊為逆變器生成柵極信號以驅(qū)動 PMSM。
為實現(xiàn) PMSM 伺服電機所需的動態(tài)性能,MPS的智能電機控制模塊可以提供參數(shù)自整定功能,而且可以根據(jù)給定的帶寬要求自動調(diào)整每個 PI 控制器。
對于電流環(huán),開環(huán)傳遞函數(shù)可以用公式(8)來估算: $$G = frac{KPS+KI} {S} frac {1}{L_{S}S + r_S}$$
對于給定電流帶寬S =jω,可以根據(jù)定子電阻和電感反向計算出PMSM 控制參數(shù)(KP 和 KI)。
與電流環(huán)類似,外環(huán)(機械環(huán))開環(huán)函數(shù)可以用公式(9)計算: $$G = frac{KPS+K1} {S} frac {kt}{JS + B}$$
其中 kt 為電機扭矩常數(shù),J 為慣量,B 為摩擦系數(shù)。
從等式 (9) 可知,已知電機扭矩常數(shù) (kt)、慣量 (J) 和摩擦系數(shù) (B),可以計算出外環(huán)的控制參數(shù)。
遞歸最小二乘算法
遞歸最小二乘算法 (RLS) 是最小二乘 (LS) 回歸算法的遞歸應(yīng)用,從每次迭代中獲取新數(shù)據(jù)以修改系統(tǒng)先前的估值。
系統(tǒng)輸出 (y(t)) 可以用公式 (10) 來計算: $$y(t)=?^T (t)θ(t)$$ 其中 ? 是系統(tǒng)輸入矩陣,θ 是 PMSM 系統(tǒng)參數(shù)。
用$hat θ$ (這個符號請copy 英文原文字母) 表示估算的系統(tǒng)參數(shù)。目標函數(shù),或旨在最小化或最大化的項,可以用等式 (11) 來估算:
$$J(θ,t)= frac {1}{2} ∑_{i=1}^t(y(i)-phi^T (i) hatθ (i)) $$ P 和 L 的新矩陣可以分別用等式 (12) 和等式 (13) 來計算: $$P^{-1}
(t)=∑_{i=1}^tphi(i)phi^T(i)$$ $$L(t)=P(t)phi(t)$$
遞歸最小二乘參數(shù)識別方案通過等式(14)、等式(15)、等式(16)、等式(17)和等式(18)估算: $$?(t)=(y(t)-phi^T (t)) hatθ (t-1)$$
$$L(t)=P(t-1)phi(t) (I+phi^T (t)P(t-1)phi(t))^{-1}$$
$$P(t)=(I-L(t)phi^T (t))P(t-1)$$
$$hatθ(t)=hatθ (t-1)+L(t)?(t)$$
$$t=t+1$$
在算法中添加一個遺忘因子能夠使方案得以處理時變系統(tǒng)。根據(jù)數(shù)據(jù)的新舊,賦予遺忘因子數(shù)據(jù)以一定的權(quán)重。因為舊數(shù)據(jù)對當前迭代的影響較小,所以給最新數(shù)據(jù)賦予算法的最大權(quán)重。遺忘因子 (λ) 的取值范圍在 [0,1] 之間。新的目標函數(shù)可以用等式(19)來估算:
$$J(θ,t)=frac {1}{2} ∑_{i=1}^tλ^{t-i} (y(i)-phi^T (i)hat θ (i)) $$
使用方程 (19) 中的新目標函數(shù),第 n 個舊數(shù)據(jù)的權(quán)重為 λn。帶遺忘因子的遞歸最小二乘方案可以通過等式 (20)、等式 (21)、等式 (22)、等式 (23) 和等式 (24) 來計算:
$$ ?(t)=(y(t)-phi^T (t)) hatθ (t-1)$$
$$L(t)=P(t-1)phi(t) (λI+phi^T (t)P(t-1)phi(t))^{-1}$$
$$P(t)= frac {1}{λ}(I-L(t) phi^T (t))P(t-1)$$
$$hatθ (t)=hatθ (t-1)+L(t)?(t)$$
$$t=t+1$$
實驗結(jié)果
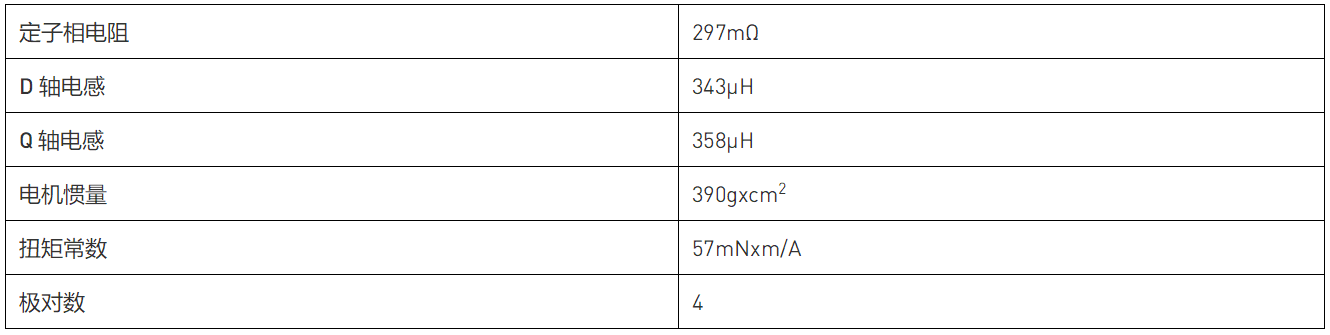
MPS’s MMP757188-36 是一款已經(jīng)過驗證的 智能電機。表 1 列出了其數(shù)據(jù)手冊中的電機參數(shù)。
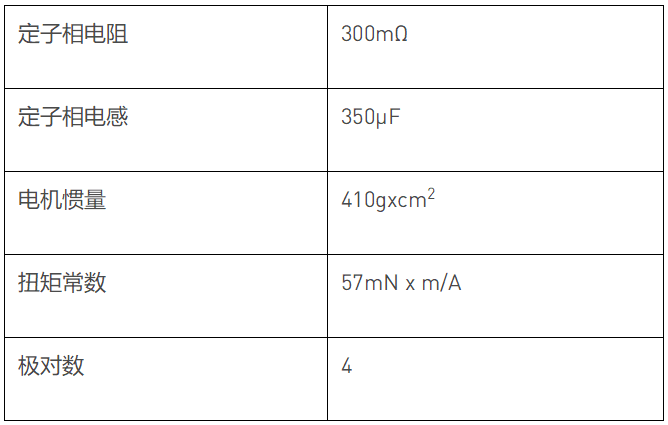

圖 2:MPS 智能電機(MMP757188-36)
將以下電機參數(shù)的初始起點設(shè)置為[0 0 0 0 0]T: 相電阻(RS),Q軸電感(LQ),D軸電感(LD),扭矩常數(shù)(kt), 和電機軸慣量(J).
對于 RLS 算法,初始 P 矩陣設(shè)置為P = 10000 x I5 x 5,遺忘因子設(shè)置為 λ = 0.99.
將啟動條件應(yīng)用到 MPS 智能電機控制模塊,執(zhí)行 RLS 電機參數(shù)算法。圖 3、圖 4、圖 5、圖 6 和圖 7 顯示了其硬件實驗結(jié)果。
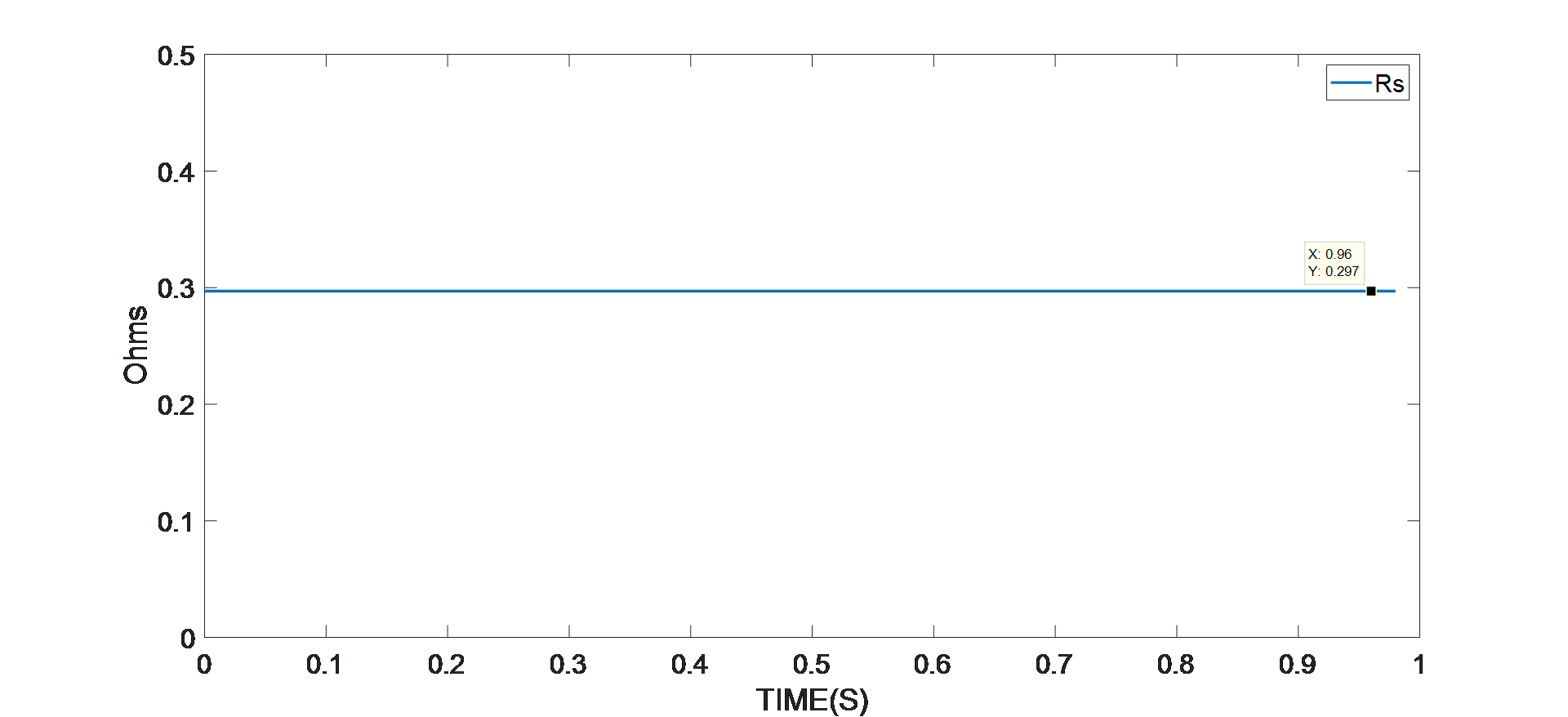
圖 3:電阻識別的實驗結(jié)果
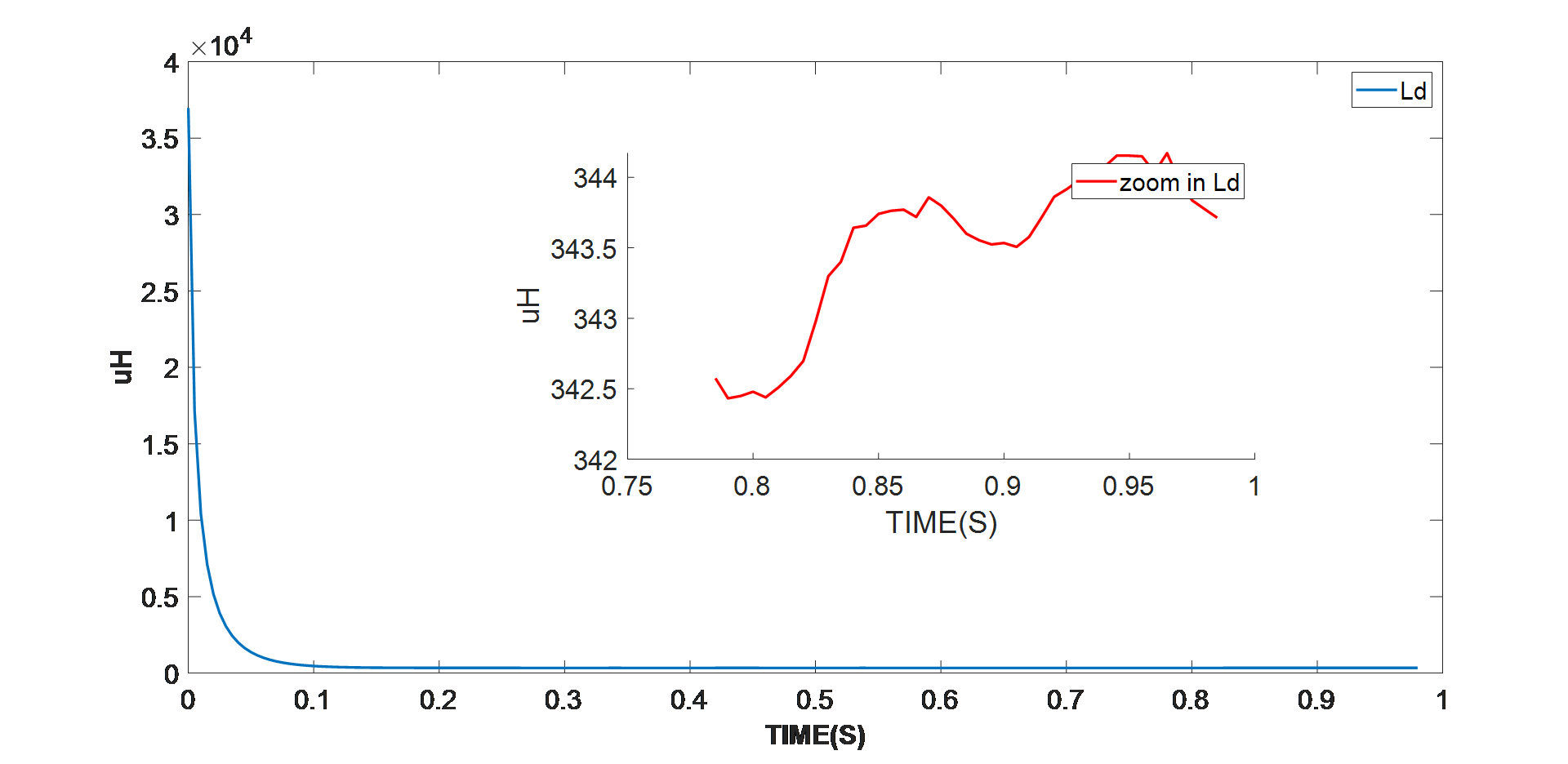
圖 4:D 軸電阻識別的實驗結(jié)果
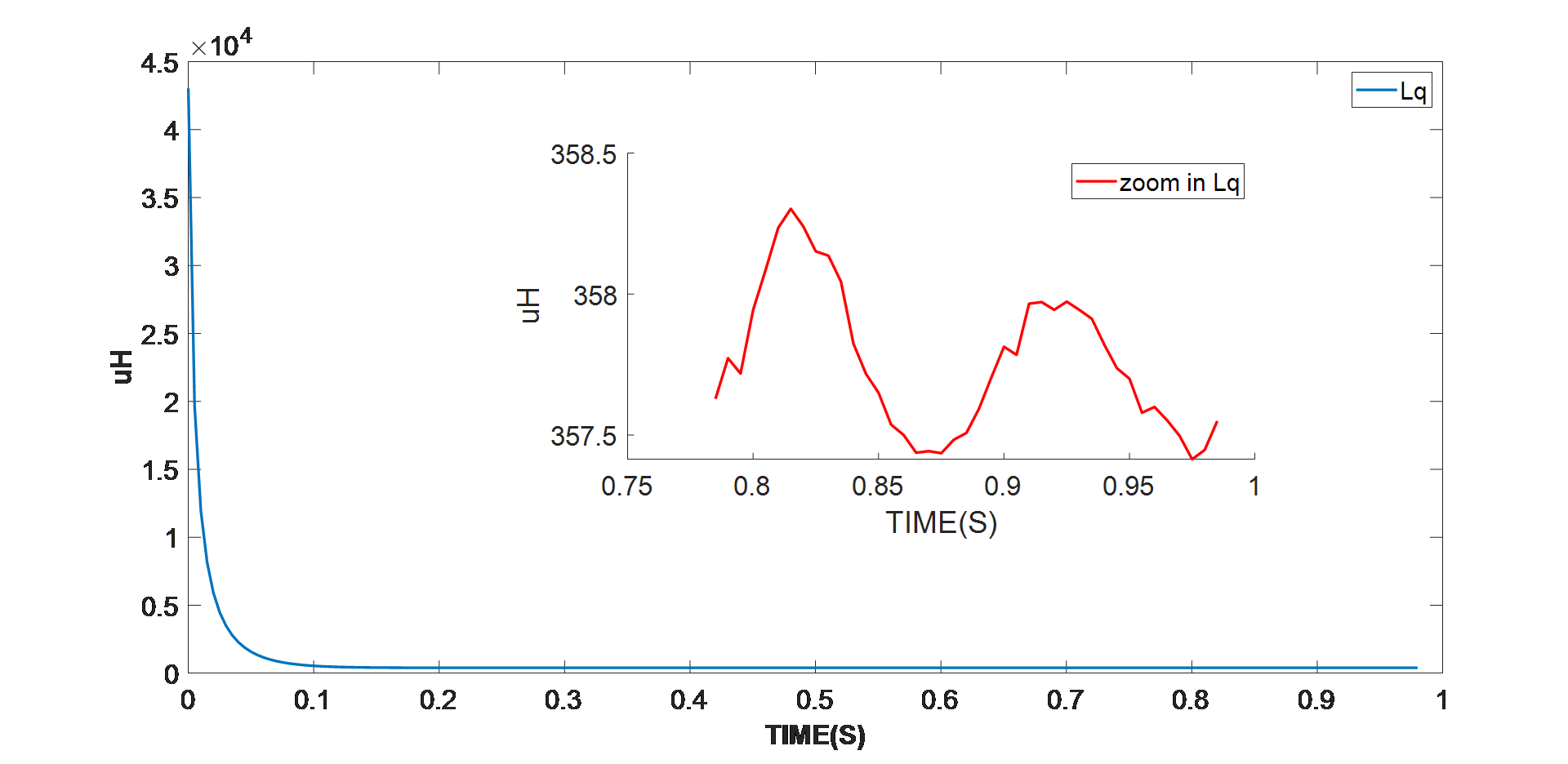
圖 5:Q 軸電阻識別的實驗結(jié)果
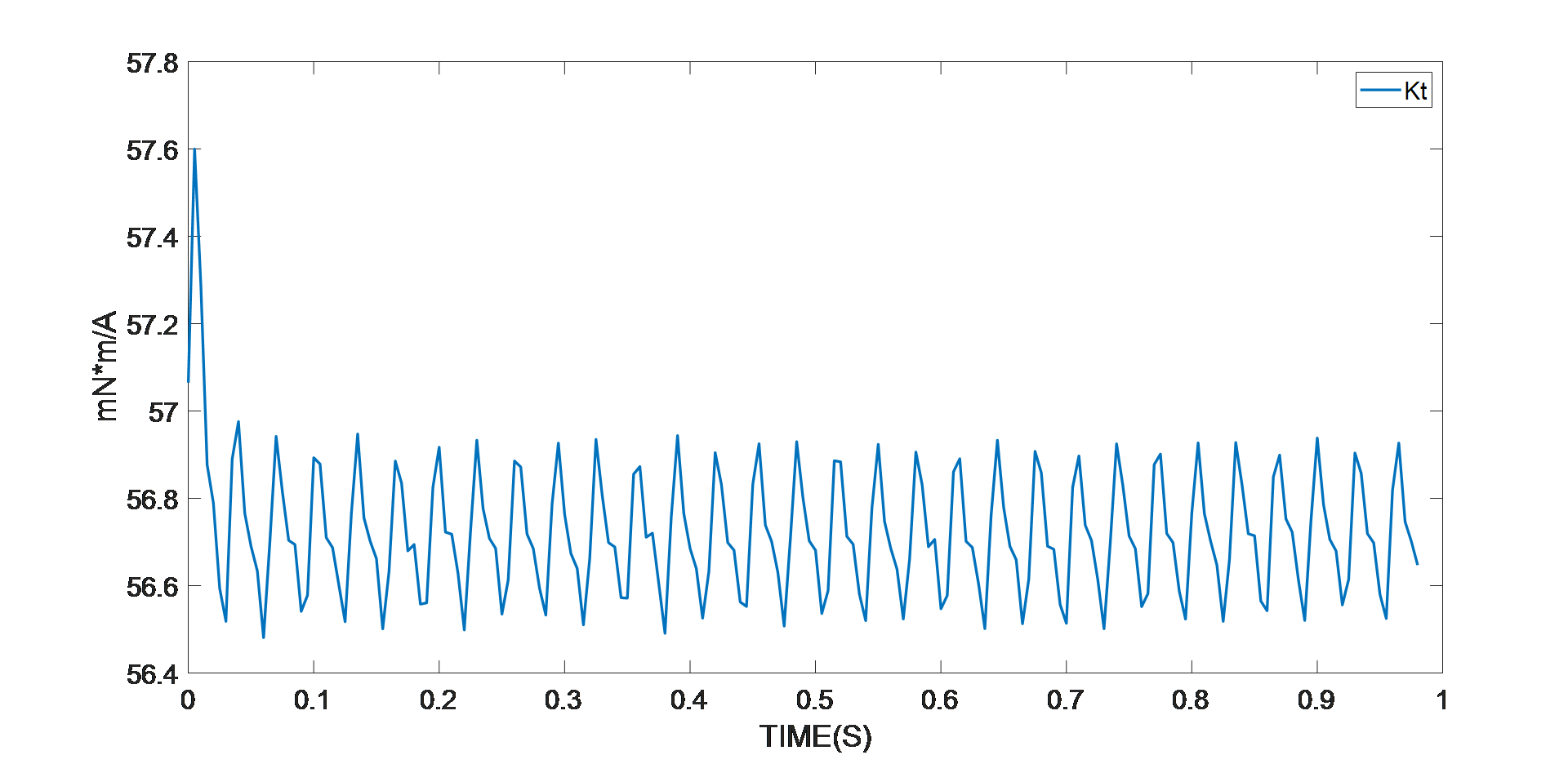
圖 6:扭矩常數(shù)識別的實驗結(jié)果
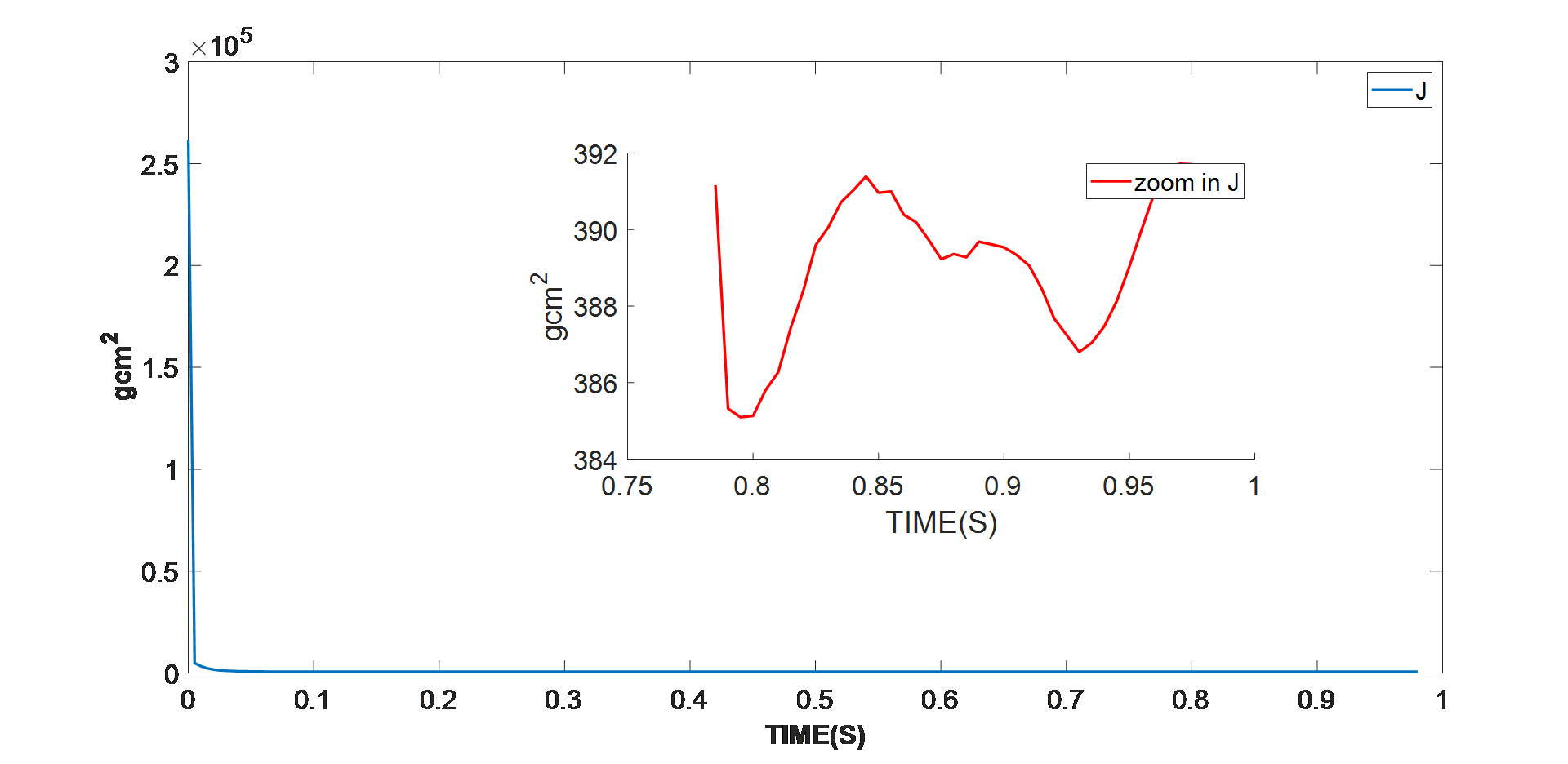
圖 7:軸慣量識別的實驗結(jié)果
智能電機控制模塊(本例中為 MMP757188-36)檢測參數(shù)識別算法是否已進入穩(wěn)定階段。如上圖所示,在算法進入穩(wěn)定狀態(tài)之后,采用最終值,即平均電機參數(shù)值。
控制環(huán)自整定
如前文所述,電機參數(shù)會影響 PMSM 的 FOC 控制參數(shù)。為幫助工程師實現(xiàn)所需的電機性能,MPS 控制套件配備了智能電機控制模塊,該模塊使用公式 (8) 和公式 (9) 中得到的系統(tǒng)傳遞函數(shù)自動調(diào)整控制參數(shù)。如果已知電機參數(shù),工程師只需通過 MPS eMotion GUI 為每個環(huán)路輸入所需的帶寬。上位機計算電機的控制參數(shù),然后將控制參數(shù)反饋給智能電機以確保其性能。
PMSM 的控制傳遞函數(shù)高度依賴電機參數(shù)。如果電機參數(shù)不正確,電機將無法有效運行。在下面關(guān)于改變軸慣量 (J) 的示例中,我們將進一步討論這個問題。
PMSM 通常被用作高性能伺服電機。它們的工作條件視情況而異。工程師可能有準確的電機參數(shù)數(shù)據(jù)手冊,也有可能需要手動測量電機參數(shù)。一旦將電機置于復(fù)雜的機械系統(tǒng)中,就很難再確定軸慣量。
MPS’s MMP757188-36可用于驅(qū)動旋轉(zhuǎn)盤(見圖 8)。旋轉(zhuǎn)盤的軸慣量從410 gxcm2增加到 7100 gxcm2。FOC設(shè)計為位置帶寬是20Hz,速度帶寬是200Hz,電流帶寬是2000Hz。
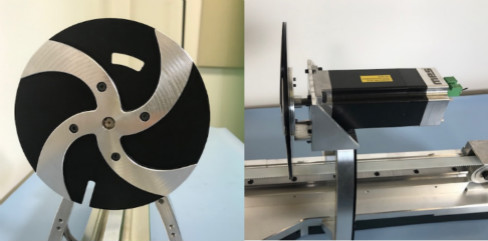
圖8:智能電機驅(qū)動旋轉(zhuǎn)盤
如果使用的電機參數(shù)來自設(shè)備的數(shù)據(jù)手冊,自動整定算法會采用預(yù)期的環(huán)路帶寬來設(shè)計控制環(huán),但由于數(shù)據(jù)手冊僅提供空載慣量,因此電機參數(shù)會出錯。位置參考是斜率為 10rad/s 的斜坡參考。圖 9 表明,當位置環(huán)失控時,位置反饋將有較大的振蕩。
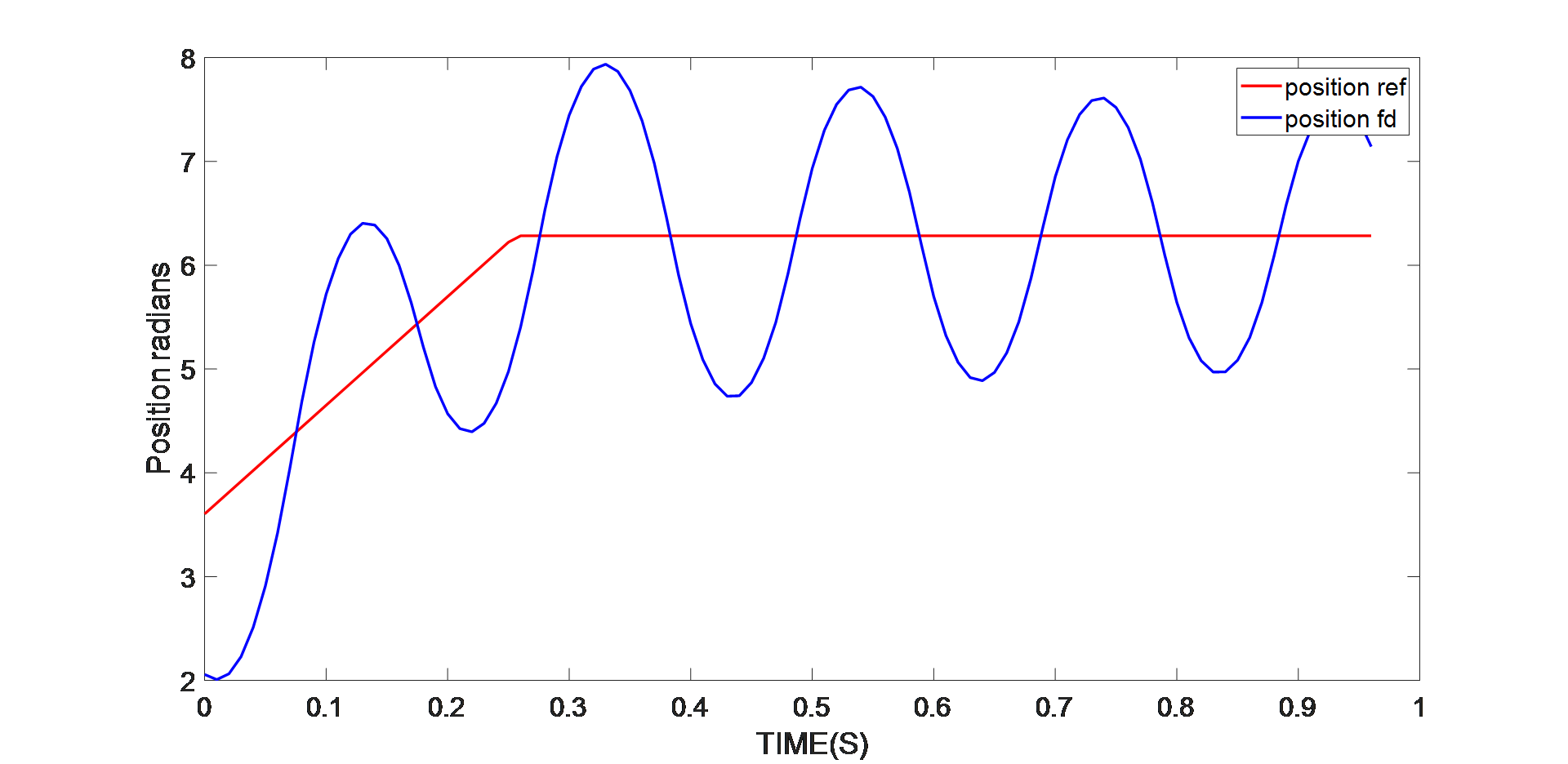
圖 9:原始 J 值的位置控制性能
采用MPS的智能電機控制模塊,運行參數(shù)識別算法。電機參數(shù)將根據(jù)電機當前工作條件更新,而自整定算法則能幫助工程師根據(jù)當前條件下的電機參數(shù)調(diào)整控制環(huán)路。電機使用相同的位置參考,位置反饋以 0.03% 左右的穩(wěn)定誤差追蹤參考值(見圖 10)。
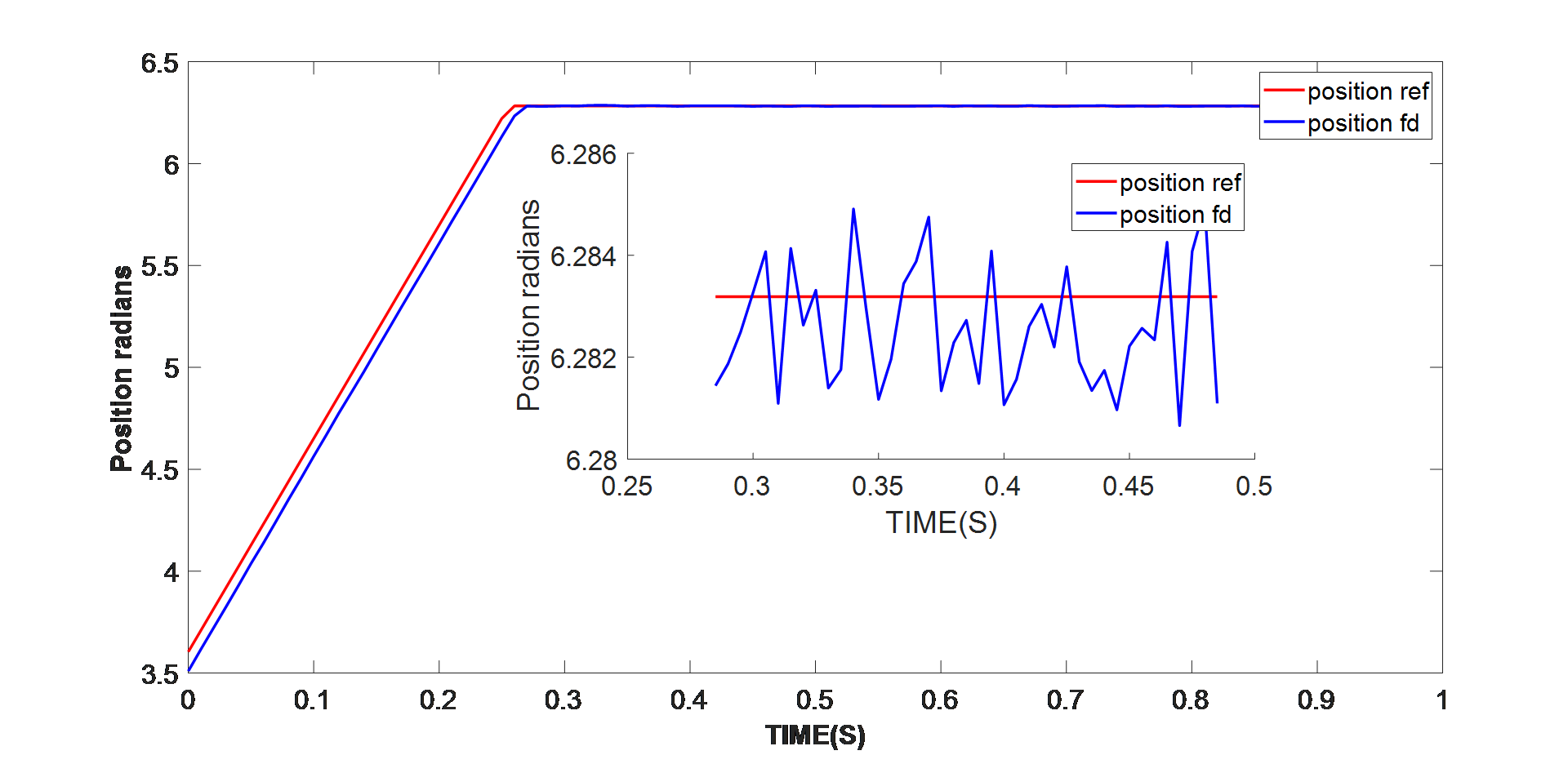
圖 10:更新 J 值的位置控制性能
結(jié)論
本文介紹了如何利用MPS智能電機控制模塊實現(xiàn)基于 RLS 的PMSM電機參數(shù)識別解決方案,并采用MPS 的 MMP757188-36在硬件實時測試中驗證了其性能。文中還給出了具有不同慣量值的位置控制示例,用以說明參數(shù)識別的重要性。另外,由于PMSM FOC 取決于多個電機參數(shù),本文還證明了其他參數(shù)對控制環(huán)路的影響。
來源:MPS
免責聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請聯(lián)系小編進行處理。
推薦閱讀:

